
전방 피킹 후면 보관 시스템
U-BOT 전방향 스태커 로봇 + R-BOT 4-Way 셔틀
-
PDF 다운로드
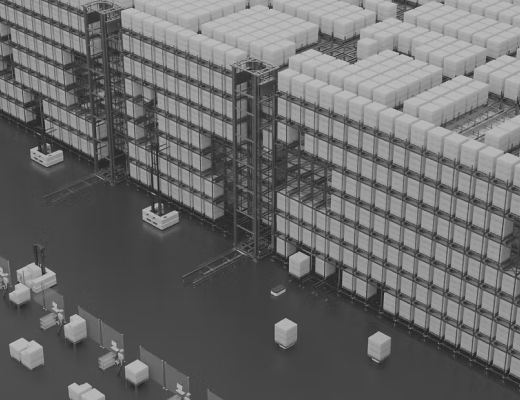
U-bot과 R-bot은 "전방 버퍼링 및 후방 보관" 작업을 위해 결합됩니다. U-bot은 엘리베이터, 컨베이어, AGV 등 여러 장비 기능을 대체하며, 별도의 4방향 셔틀 창고에 비해 피킹 효율성과 정확성을 크게 향상시킵니다. 보관 밀도와 피킹 효율을 극대화하려는 고객에게 가장 적합한 선택입니다.
01U-Bot + R-Bot 보관 시스템의 장점
- U-bot + R-bot 초고효율 및 초고밀도 보관 및 피킹 시스템은 U-bot 전방위 스태커 로봇과 R-bot 4-Way 셔틀을 결합하여 전방 피킹 및 후방 보관 작업을 가능하게 합니다.
-
U-bot은 엘리베이터, 컨베이어, AGV의 역할을 대신하며, PTP 스마트 창고 소프트웨어와 통합 시 효율성 및 밀도의 "이중 제어"를 통해 피킹 정확도를 크게 향상시킵니다.
이 시스템은 효율적이고 고밀도인 혁신적인 보관 및 피킹 솔루션입니다.

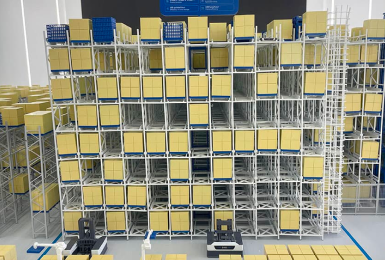
- 초고밀도 보관
-
- - "배치 벽” 피킹 위치로 공간 활용 극대화
- - 고정된 통로 없이 높은 공간 활용

- 초고효율 운영
-
- - 언팩킹 없이 빠른 피킹, 더 많은 고객의 요구에 맞춤
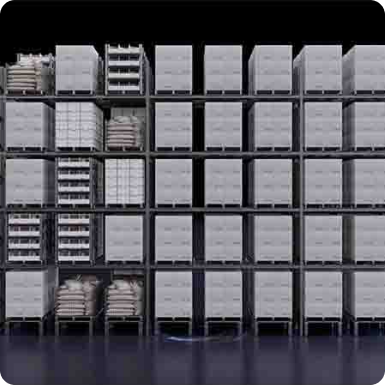
- - 효율적인 보관과 피킹을 위한 여러 단층 깊이의 랙 구조 설계
- - 랙 시스템 내 R-bot, 외부의 U-bot이 운영되는 시스템으로 다수의 장치 효율적 협력 및 지능형 스케줄링

- 초고속 ROI
-
- - 2 ~ 3년
- - 별도의 4-Way 셔틀 창고보다 더 빠르고 쉽게 배치 가능
- - 컨베이어 리프팅 장비가 없어 비용 절감

- 유연한 배치
-
- - 랙 구조물 앞 컨베이어 라인 필요 없는 솔루션으로 창고의 더 유연한 운영
- - 주문 요구에 따라 U-bot, R-bot 수의 유연한 증감 가능
- - 창고 전반적인 운영 계획, 단계적 실행, 유연한 확장
* 배치벽 방식은 고정된 통로 없이 여러 단층 깊이로 물품을 배치할 수 있어, 공간 활용도를 높이고, 이러한 구조는 피킹 효율을 높이는 데 매우 유리합니다.
입고 프로세스
- STEP 01
-
팔레트에 실린 자재가 포크리프트를
통해 입고 지점으로 이동되며, PDA를
통해 입고 작업이 진행되고 WMS
시스템이 입고 보관을 요청합니다.

- STEP 02
-
U-Bot은 작업 지시를 받아 자재를
입고 지점에서 지정된 위치로 옮깁니다.
- STEP 03
-
4-Way 셔틀이 대기 지점에서 창고
앞쪽 캐시 포인트로 이동하고
자재를 지정된 위치로 올립니다.
높은 위치의 자재는 엘리베이터를
통해 운반됩니다.
- STEP 04
-
입고 작업이 완료되면, 4-Way 셔틀은
시스템에 피드백을 주고, 백엔드 시스템은
실시간으로 재고 정보를 업데이트합니다.
출고 프로세스
- STEP 01
-
주문 또는 창고 계획에 따라 WMS가
작업 지시를 보내고, WCS 시스템이
4-Way 셔틀을 일정에 맞춰 배치합니다.
- STEP 02
-
4-Way 셔틀은 자재를 출고
지점으로 운반하여 대기하고, 높은
위치의 자재는 엘리베이터를
통해 미리 준비됩니다.
- STEP 03
-
U-Bot은 4-Way 셔틀에서 자재를
가져와 출고 지점에 배치하고,
수동/자동 피킹 작업을 기다립니다.
- STEP 04
-
피킹 작업이 완료되면 남은
팔레트가 창고로 반환되고, WMS 시스템은
보관 정보에 대한 업데이트를 진행합니다.
02특징 및 장점
01
다양한 겐트리 높이 지원
창고 높이에 따라 U-Bot은 다양한 겐트리 높이(4.5m/6m/8m)를 지원합니다.
02
온도 환경 지원
R-Bot은 -25°C에서 45°C의 온도 환경을 지원하며, 다양한 팔레트 크기에 적합합니다.
03
3D 깊이 카메라 구성
3D 깊이 카메라를 구성하여 팔레트 위치를 지능적으로 인식하고, 편차를 자동으로 수정합니다.
04
지능형 충전 스테이션
지능형 충전 스테이션을 갖추고 있으며, 충전 상태를 실시간으로 모니터링하고 안전 보호 기능을 제공합니다.
05
다양한 컨테이너 지원
여러 크기의 컨테이너를 혼합하여 대형, 중형, 소형, 다양한 유형 및 수량의 보관 요구를 충족할 수 있습니다.
06
다기능 작업대
다기능 작업대와 함께 사용하여 피스 피킹을 하거나, 로봇 팔을 이용해 피스 피킹을 수행할 수 있습니다.
03데이터 시물레이션 예시





- 창고 크기
- L60m x W20m x H130m
- 제품 구성
- U-bot2, R-bot5, H-bot*1
- 보관 위치 수 (셀수량)
- 3432개
- 적용 가능한 SKU
- ≤10000
- 입출고 효율성
- ≥60 팔레트/시간
- 피킹 효율
- ≥200 피스/시간
- 투자 금액
- 600,000 USD+
* 이 시스템은 다양한 크기의 창고와 대규모 작업을 처리할 수 있는 효율적인 솔루션을 제공합니다.
04적용분야
시나리오

창고높이 (N.H.)
≤30m

SKU 수
중간

저장 밀도
높음

입출고 효율성
상대적으로 높음

피킹 효율성
높음
산업 분야

식품

3PL

전자상거래

콜드체인

소매

에너지

제약

의류
05구성 요소

U-bot 전방향 스태커 로봇

R-bot 4방향 셔틀

PTP 스마트 소프트웨어

다기능 작업대
팔레트 랙